
- français
- English
Exemple d'un (vieux) robot: Fredy II
La base de ce robot est un PRISME, kit robotique du club Robopoly à l'epfl. La partie portante de la base mécanique est construit avec des poutres-U en alu et des tiges filetées. Les étages sont faites en verre plexi.
Seulement une des trois roues est motorisée, et c'est aussi celle-là qui dirige le robot. Elle est tournée à l'aide d'un moteur servo standard.
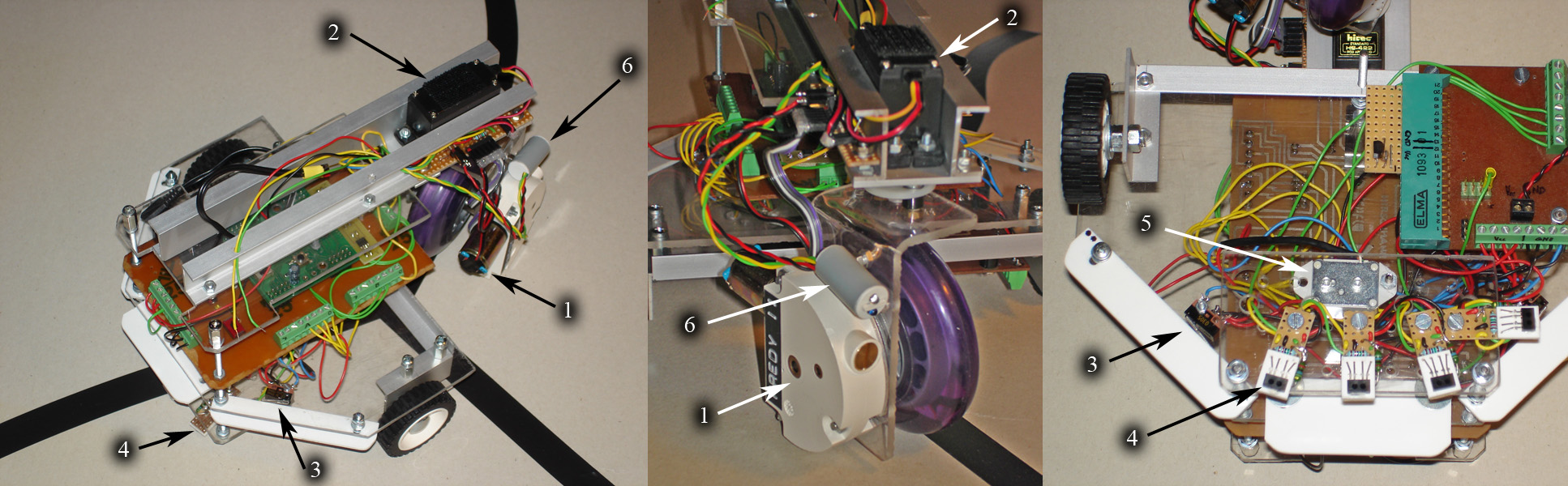
- Moteur avec réducteur
- Moteur servo pour tourner la roue motorisée
- Capteurs mécanique (bumper) pour l'évitement d'obstacles
- Capteurs infrarouge pour le suivit de ligne
- Haut parleur
- Capteur infrarouge à long distance
La programmation pour diriger ce typ de robot est relativement simple vue qu'il y a qu'une roue motorisée, et le positionnement du moteur servo est réalisable sans problèmes.
En plus on peut monter des capteurs long distance sur la roue et le robot peut toujours 'regarder' dans la direction d'avance (6).
[travail à faire, y'a tellement rien que c'est carrément du travail à faire et pas à finir... ;-)]