|
Navigation
 This wiki
This page This wiki
This page
|
Construction of 3D model
The main concerns was to model the most accurate representation of the robot keeping the simulation time close to real time. Thanks to Laurent Lessieux who provided me with the CAO model of almost all the pieces used to build the robot, the modeling task was speed up.
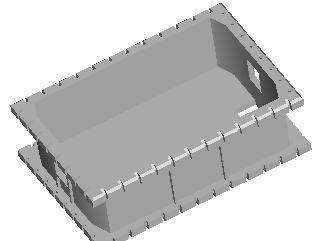
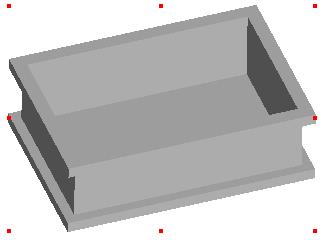
Since the CAO model of the pieces contained a high level of detail, I needed to simplify the different shapes. To achieve this purpose, I used the free software Art of Illusion allowing to model any kind of tridimensional object. The main idea between the simplification process were either to use the triangle mesh editor and manually remove meshes and reconnect or redraw a simpler shape from scratch.
Webots simulator required world file following a VRML-like structure. Art of Illusion (AOI) has an export to VRML functionality allowing to easily generate triangle meshes. The final 3D model of the robot is displayed below. 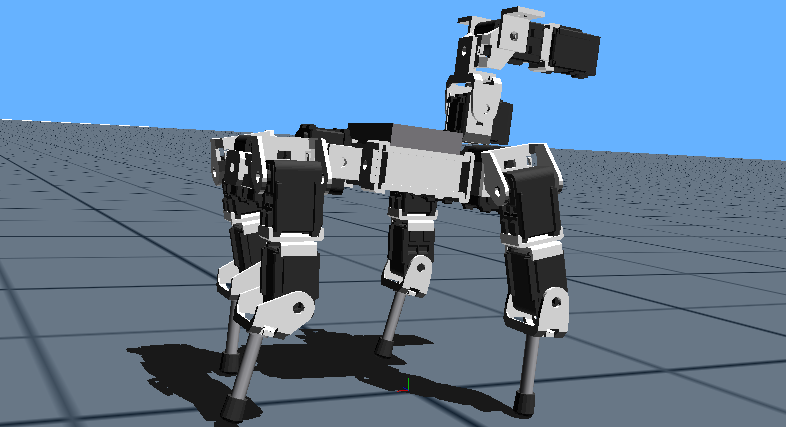 The 3D model of the soccer playground, 6 robot dogs standing up and a balls in the middle is displayed below: 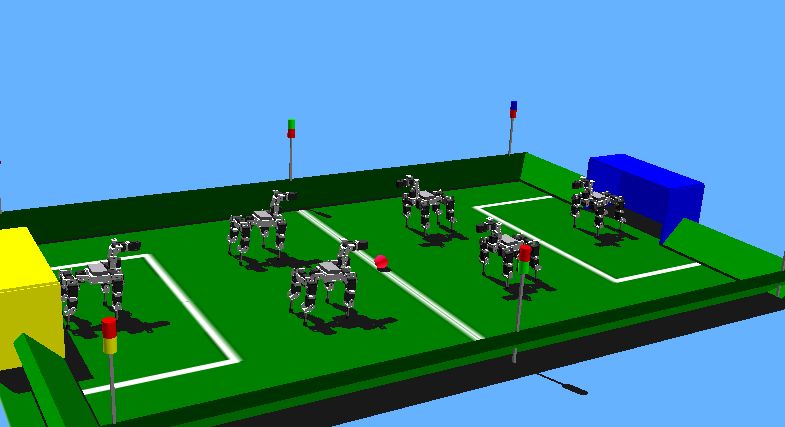 |
Share |
{kind=link}